背景
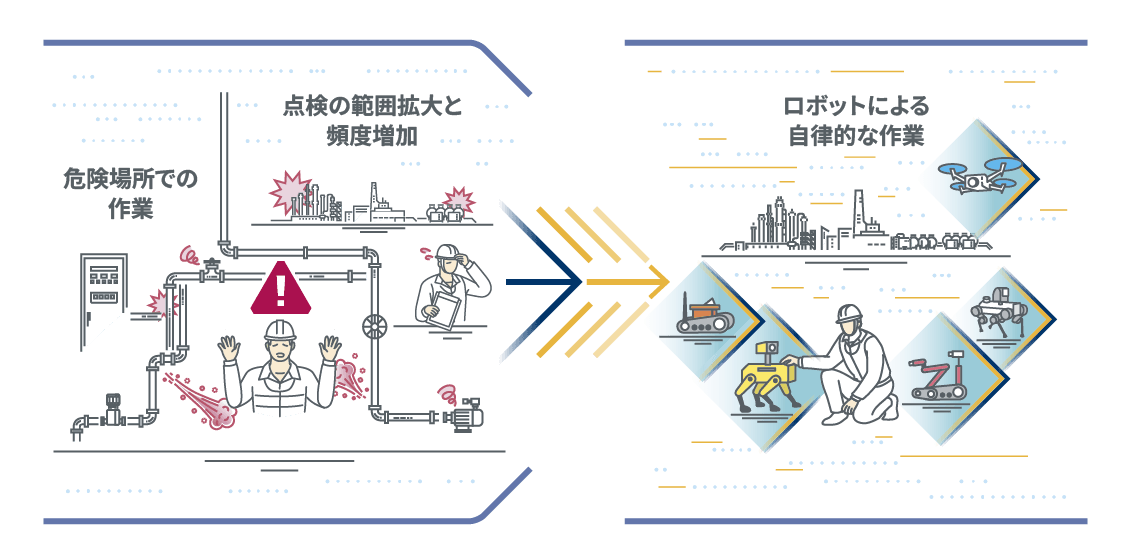
プラント現場では、危険箇所での人による作業の削減、点検対象の拡大および点検頻度の増加による作業工数増加への対応など、人手不足や安全性確保の課題が深刻化しています。これらの課題に対して、デジタルトランスフォーメーションによる操業の自律化を目指した取り組みが進められており、操業の自律化を実現するための中核技術の一つとして、ロボティクスが注目されています。
技術
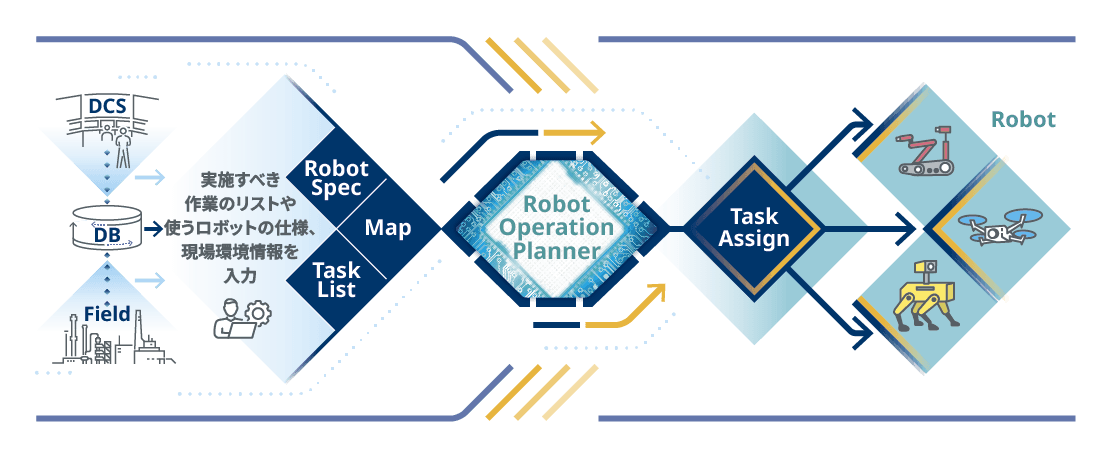
私たちは、プラント操業の自律化を支援するため、多様なロボットを活用し、効率的な運用を自動で計画する技術開発を進めています。プラント現場には点検を含む作業リストがあり、ロボットごとの機能制約やバッテリー残量などの状態に応じて、作業内容と移動経路を設計し、それに基づいて動作を実行します。さらに、操業を維持するには突発的な作業や想定外のロボット故障への対応が必要です。そのため、事前に計画したロボット運用を状況に応じて迅速に更新できることが求められます。
本技術の導入により、多数のロボット運用を自動化し、現場の負担を大幅に軽減するとともに、プラント点検などの業務効率化と自律性の向上を実現することを目指します。
技術の強み
・プラント巡回点検で求められる実施時刻や検査内容などの条件に適合した手法です。
・プラントや工場全体の操業制約を考慮してロボット群の運用計画とタスク割当を行い、状況変化に応じて自動的に再計画します。
将来構想
将来的には、プラント全体の操業を俯瞰し、ロボット群が自律的に判断・動作する運用が期待されます。これにより、作業員は危険箇所での作業から解放され、付加価値の高い業務に集中できます。さらに、異常検知から保守対応までを自動化することで、プラントの安全性と生産性を飛躍的に向上させます。人とロボットが協働するスマートプラントの実現は、DXの加速と競争力強化に直結します。